The set cover problem
- Given `bb(U)`, a set; here, a set of points
- Given collection `bb(S)` of subsets of `bb(U)`, here called "objects"
- Given `bb(M) subset bb(U)`, find the smallest subset `C` of `bb(S)` that covers `bb(M)`
For example: siting of basestations
- Objects are footprints of basestations, `bb(M)` is market area
- Footprint is area visible to basestation
- Choose from among discrete set of such footprints
- Often modeled as circular disks in the plane
- An idealization, esp. for directional antennas
Simplified cases of basestation siting
- Results here apply to a few simplifications:
- Fat triangles
- Visibility regions at points in a 1.5d terrain `approx` "guarding"
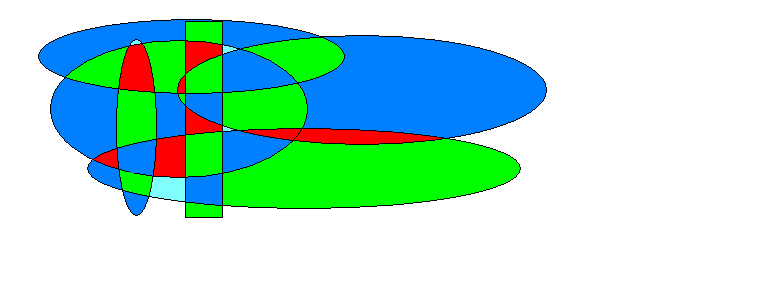
New results: hypothesis
- If complement of `cup(R)` has roughly linear combinatorial complexity
- Random `R subset bb(S)`
- Decomposable into expected `f(r) = o(r log r)` simple regions,
`r:=|R|`
- For example, trapezoidization of complement of linear-complexity union
`epsilon`-nets: equivalent points
- `log |bb(M)_epsilon|` could be large
- Maybe not in geometric settings
- Say that `x approx y` for `x,y in {: bbb()_epsilon :}` if `x in S iff y in S`, for all `S in bb(S)`
- Need only consider equivalence classes `bb(M)_epsilon/approx`
- For example, if VC dimension is `d'`, have `O(r^{d'})` classes for `R`
- Implies sample of size `O(d' \log (1//\epsilon))//epsilon` is a cover of `bb(M)_epsilon`
`epsilon`-nets: a different approach
- Sometimes `bb(U) setminus cup(R)` is "simple"
- For triangles, can make trapezoidal decomposition
- A trapezoid T is in decomposition iff:
- `d=O(1)` triangles "defining" `T` are in `R`
- None of the `|T|` triangles meeting `T` are in `R`
- `R` induces a collection of trapezoids `F_0(R)`,
`cup(F_0(R)) = bb(U) setminus cup(R)`
`epsilon`-nets using `F_0(R)`
- If `x in bb(M)_epsilon` and `x` in trapezoid `T`,
- Then `|T| ge epsilon |bb(S)|`
- (`|T|=` number of sets meeting `T`)
- There are `O(r^d)` such `T` possible, since `d` triangles define `T`
- For random subset of size `r`,
- Probability that some such `T` is not met by `R` is `O(r^d)(1-epsilon)^r`
- Similar to before, `r=(d \log(1//\epsilon))//epsilon` is big enough
- [C86]
Small `F_0(R)` `=>` small `epsilon`-nets: alteration
- Use the alteration/mutation/repair method
- As in [CF], specialized to small `F_0(R)`
- Take random sample `R` of size `r:=1//epsilon`;
- Will find `epsilon`-net of size `O(f(r))`, `f(r)=E|F_0(R)|`
- Compute `F_0(R)`;
- "Patch up" regions in `F_0(R)`: find `epsilon_T`-nets for region `T`
- `epsilon`-net is union of `R` and `epsilon_T`-nets for each `T in F_0(R)`
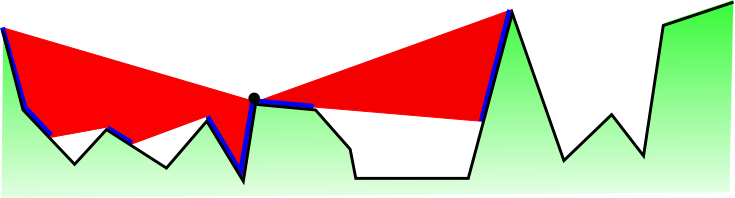
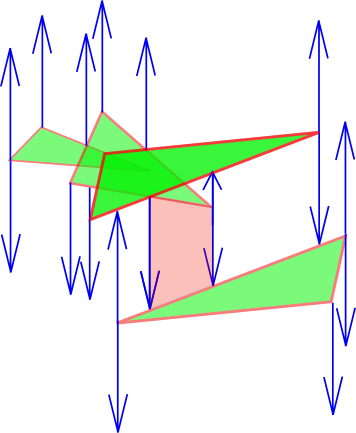
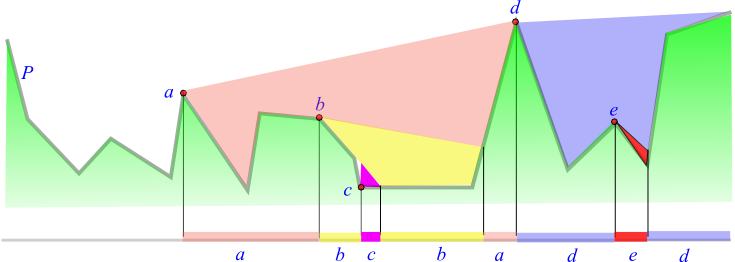
Terrain guarding: visibility
- Have terrain `P`, an `x`-monotone polygonal path
- Set `G` of point guards on `P`
- `g in G` sees a point `p` if:
- line segment `bar(gp)` does not meet region below terrain

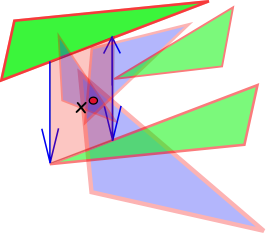
More visibility
If also:- `x(g) lt x(p)`, then `g` sees `p` from the left
- `g` is the leftmost guard that sees `p` from the left, then `g` owns `p`
- No lower point at `x(p)` is seen by any guard, then `g` owns `x(p)` at `p`
Why ownership?
- Any guarded point is also owned
- A set owns every point iff it sees every point
- Ownership is combinatorially simpler
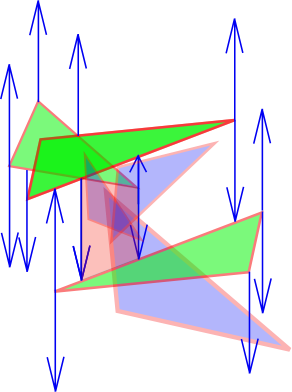
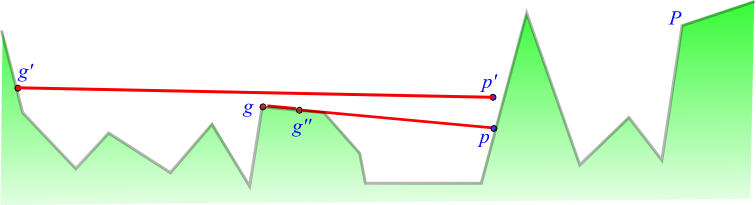
Order claim
- Generalizing [BMKM] slightly: for
- Guards `a`, `b`, points `p`, `p'`
- `x(a) lt x(b) le x(p) le x(p')`
- `a` owns `x(p)` at `p`, `b` sees `p'`
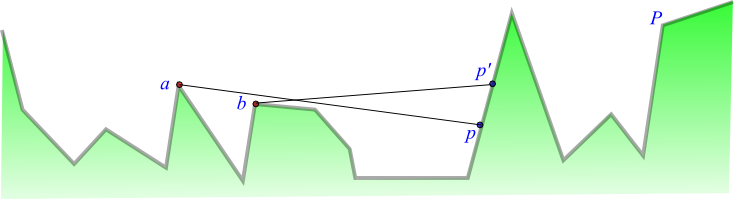
- Have:
- `a` also sees `p'`
- `b` must be below `bar(ap)`, `p` must be below `bar(bp')`
- So `b` cannot own `p'`
- No ownership pattern `a cdots b cdots a cdots b`