Sublinear-Time and Sublinear-Space Geometric Approximate Optimization for Some Problems Arising in Machine Learning and its Relatives
Ken Clarkson
IBM Almaden Research
joint with Elad Hazan and David Woodruff
Some Geometric Optimization Problems
- Throughout, `n` points in `d` dimensions
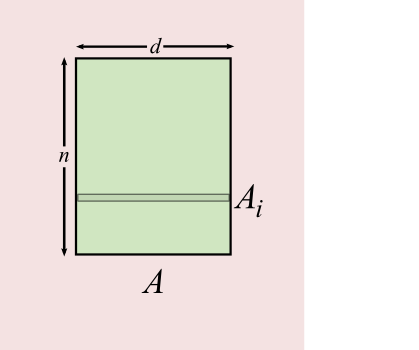
- Or: `A` is an `n \times d` matrix
- Row `i` of `A` is `A_i`
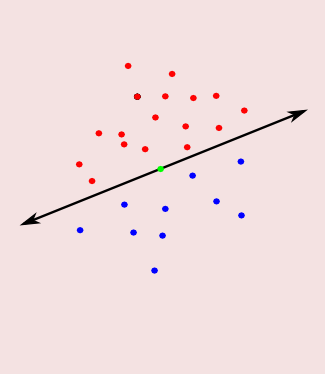
- Perceptrons: points are red or blue, split colors by a hyperplane
- A flavor of linear programming
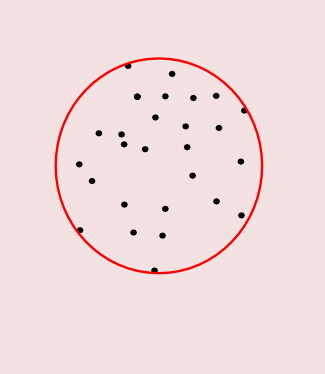
- Minimum Enclosing Ball (MEB): find the smallest ball containing the points
- A flavor of quadratic programming
Our Results
- Sublinear-time approximation algorithms, and matching lower bounds
- Matching up to polylog factors
- Additive error `\epsilon > 0`
- Perceptron: `\tilde{\Theta}(\epsilon^{-2}(n+d))`, vs. classical `O(\epsilon^{-2}\nnz{A})`
- `\nnz{A}=` number of non-zero entries of `A`
- When `\nnz{A}=nd`, a big improvement
- MEB: `\tilde{\Theta}(\epsilon^{-2}n + \epsilon^{-1}d)`, vs. `O(\epsilon^{-1/2}\nnz{A})`
- Upper bound needs norms of points to be known
- Lower bound when center must be in convex hull of input
- Previous algorithm is in upcoming SODA
- Plus: $L_2$-SVM, $L_1$-SVM (to appear), kernelized (SVM), streaming, parallel, QP in simplex,...
MEB Formulation
- One formulation is $$\min_{x\in\reals^d} R_A(x) = \min_{x\in\reals^d} \max_{i\in [n]} || x - A_i^\top||^2$$
- Find the center `x` that minimizes the maximum squared distance
- `[n] \equiv \{1,2,\ldots, n\}`
- Equivalently, $$\min_{x\in\reals^d} \max_{\color{green}{p\in\Delta_n}} \color{green}{\sum_{i\in [n]} p_t(i)}|| x - A_i^\top||^2$$
- `\Delta_n \equiv` the unit simplex `\equiv \{p\in\reals^n | \sum_i p(i) = 1, p(i)\ge 0\}`
- Since maximizing `p` puts all its weight on the farthest point
Max `p` vs. Min `x`
For rounds `t=1,\ldots T`, two players respond to each other.- The "max player" tries to find the maximizing `p_t\in\Delta_n`
- For given `x`, a short-sighted response `p` has some `p(i)=1`
- Less short-sighted: `p_t(i) = p_{t-1}(i)\exp(\eta || x_{t-1} - A_i^\top||^2)`
- For suitable value `\eta`
- ...and also normalizing so that `\sum_i p_t(i) = 1`
- That is, a Multiplicative Weights (MW) update
- The "min player" tries to find the minimizing `x_t`
- For given `p`, the best `x` is `A^\top p`, the weighted centroid of the input points
- Less myopically, update `x_t` to `x_{t+1}` by a convex combination of `x_t` and `A^\top p_{t+1}`
- That is, an Online Gradient Descent (OGD) update
A Primal-Dual Algorithm
The resulting algorithm, in pseudo-code:
`p_1\leftarrow (\frac{1}{n}, \frac{1}{n}, \ldots, \frac{1}{n})`
`x_1 \leftarrow A^\top p_1`
for `t=1,2,\ldots ,T`:
for each `i`: `p_t(i) \leftarrow p_{t-1}(i)\exp(\eta||x_{t-1} - A_i^\top||^2)`
`p_t\leftarrow p_t/||p_t||_1`
`x_t \leftarrow (1-\frac{1}{t})x_{t-1} + \frac{1}{t}A^\top p_t`
// So `x_t = \frac{1}{t}\sum_{\tau\in [t]} A^\top p_{\tau}`
`x_1 \leftarrow A^\top p_1`
for `t=1,2,\ldots ,T`:
for each `i`: `p_t(i) \leftarrow p_{t-1}(i)\exp(\eta||x_{t-1} - A_i^\top||^2)`
`p_t\leftarrow p_t/||p_t||_1`
`x_t \leftarrow (1-\frac{1}{t})x_{t-1} + \frac{1}{t}A^\top p_t`
// So `x_t = \frac{1}{t}\sum_{\tau\in [t]} A^\top p_{\tau}`
The Primal-Dual Algorithm is Not Too Bad
- Claim: for `T=\tilde{O}(1/\epsilon^2)`, `\bar{x} = \sum_{\tau\in [T]} x_\tau/T` has $$R_A(\bar{x}) \le R_A(x^*) + \epsilon.$$
- Time per iteration is `O(\nnz{A})=O(nd)`
- Except for computing `A^\top p_t` and the squared distances `||x_t - A_i^\top||^2`, work is `O(n+d)`
- Since `||x_t - A_i^\top||^2 = ||x_t||^2 + ||A_i||^2 - 2A_i x_t`, need basically `Ax_t`
- We're assuming all `||A_i||` are known
Randomizing the Primal-Dual Algorithm
- We can use random estimates so that one iteration takes $O(n+d)$ total time
- To update $x_t$, pick $i_t$ with prob. $p_t(i)$, and use $A_{i_t}^\top$ instead of `A^\top p_t`
- `\E[A_{i_t}^\top] = A^\top p_t`, so update is the same in expectation
- To update `p_t(i)` to $p_{t+1}(i)$, estimate `||x_t - A_i^\top||^2` by:
- Pick $j_t$ with probability $x_t(j)^2$ (assuming `||x_t||=1`)
- Use $z_t \equiv A_i(j_t)/x_t(j_t)$ as estimate of $A_i x_t$
- $\E[z_t] = \sum_j [A_i(j)/x_t(j)] [x_t(j)^2] = \sum_j A_i(j) x_t(j) = A_i x_t$
- Estimate `||x_t - A_i^\top||^2 \approx v_t(i) \equiv ||x_t||^2 + ||A_i||^2 - 2z_t(i)`
- We call these estimation techniques $\ell_1$ and $\ell_2$ sampling, respectively
The Randomized Primal-Dual Algorithm is
Not Too Bad
- Claim: for `T=\tilde{O}(1/\epsilon^2)`, the output vector `\bar{x} = \sum_{\tau\in [T]} x_\tau/T` has $$R_A(\bar{x}) \le R_A(x^*) + \epsilon.$$
- NB: same as for deterministic version
- Time per iteration is `O(n+d)`
- Can be much faster than deterministic version
- But maybe there's big multipliers hiding in the `\tilde{O}()`?
Randomized vs. Deterministic
- Noise added to distances to simulate `\ell_2` sampling
- Color: large `\color{red}{p_t(i)}`, small `\color{blue}{p_t(i)}`,
HSL interpolation - Black dot is center `x_t` for randomized
- Black dot with red ring is center `x_t` for det.
- After some iterations, similar behavior
Randomized vs. Deterministic for "real" data
- Ratio of farthest point distances, randomized/deterministic
- Very preliminary
- Some data sets from MLComp, with or without a single additional added outlier
- Here also, randomized `\approx` deterministic after 25 or so iterations
- To do: comparison with state of the art
Kernelization
- In kernel methods, the input `A_i` are lifted to points `\Phi(A_i)`
- `\Phi` is non-linear
- For some popular `\Phi()`:
- Dot products `\Phi(A_i)\Phi(A_j)^\top` can be computed from
- Dot products `A_iA_j^\top`
- We show:
- Good enough estimates of `\Phi(A_i)\Phi(A_j)^\top` can be computed from
- Good enough estimates of `A_iA_j^\top`
- E.g.: for the polynomial kernel `(x^\top y)^g`, use `g` independent estimates of `x^\top y`
- Increase in running time is additive `O(1/\epsilon^5)`
Remaining Questions
- How can the randomized algorithm possibly work?
- Analysis ingredients: regret bounds, concentration (tail estimates)
- Surely someone has done something very similar already?
- Related work, in particular using `\ell_1` sampling
- What does this have to do with low-rank matrix approximation?
- `\ell_2` sampling vs. sketching for matrix-product estimation
Ingredients of the Analysis:
Regret Bounds and Concentration
- Regret bounds for on-line convex optimization
- `x_t` does nearly as well, overall, as the best single `x`, for minimizing average distances to the `A_{i_\tau}`
- `p_t` does nearly as well, overall, as the best single `p`, for maximizing the averages of the distance estimates `v_t(i)`
- Concentration bounds for the estimators, such as:
`\sum_{t\in [T]} v_t(i)` is close to its expectation `\sum_{t\in [T]} ||x_t - A_i||^2`
for all `i\in [n]`
Concentration Bounds
- The `\ell_2`-sampling estimator has variance `\norm{A_i}^2\norm{x_t}^2`
- Assume that all such variances are `\le 1`, that is, all `\norm{A_i}\le 1`
- I've been lying: we don't quite use the estimator `v_t` as described
- We clip it to `\tilde{v}_t(i) \leftarrow \textrm{Clip}(v_t(i), 2/\epsilon)`, so that `|v_t|\le 2/\epsilon`
- Where `\textrm{Clip}(x,a) \equiv \min\{a, \max\{-a, x\}\}`
- We have `| \E[v_t(i)] - \E[\tilde{v}_t(i)] | \lt \epsilon`
- (Using here `\E[v_t(i)]\le 2`)
Concentrated Estimators via Variance Bounds
- `\sum_{t\in [T]} \tilde{v}_t(i) \approx \sum_{t\in [T]} \E[v_t(i)]` via a Martingale version of:
- The proof follows from Bernstein's inequality and the claim about the expectation of the clipped version
Theorem. Let `Y_1,\ldots,Y_T` be independent random variables with `|\E[Y_i]|\le 1` and `\Var[Y_i]\le 1` for all `i`.
For `\epsilon, \delta>0`, there is `T\approx \log(1/\delta)/\epsilon^2` so that with probability at least `1-\delta`,
$$| \sum_{t\in [T]} \textrm{Clip}(Y_t,2/\epsilon) - \sum_{t\in [T]} \E[Y_t]\, | \le T\epsilon.$$
Digression: Other Concentrated Estimators
from only Variance Bounds
- Another estimator with similar bounds:
- Split the `Y_i` into `\log(1/\delta)` groups of `1/\epsilon^2` each
- Take the median of the averages of each group
- Long known, e.g. in the streaming literature
- Both this median-of-averages and our average-of-clipped estimator are non-linear, which is surely inevitable
- It is also possible to get a concentrated estimator when the variance is bounded but unknown (Catoni)
Related Work: Coresets,
Low-Rank Approximation
- Coresets: small subsets of input points that specify approximation solutions
- Given `\epsilon`-coreset `C`, all input is inside `(1+\epsilon)\textrm{MEB}(C)`
- A variety of applications since introduced about a decade ago
- The rows `A_{i_t}, t\in [T]` comprise a coreset
- Together with columns `A_{:j_t}, t\in [T]`, specifies our solution
- For classifier results as well as MEB
- Akin to rows and columns of low-rank approximation
- Vaguely, kind-of, a bit
Related Work: Prior Primal-Dual Algorithms
- Our perceptron algorithm finds $$\min_{p\in\Delta_n} \max_{x\in\Ball_d} p^\top Ax$$
- Previous work [GK,KY] found sublinear approx. algorithms for $$\quad\quad\min_{p\in\Delta_n}\max_{x\in\color{green}{\Delta_d}} p^\top A x$$
- Optimal mixed strategies for a game
- Assumes bound for `||A_i||_\infty`
- Better results: small relative error
- Easier(?) problem, because `\ell_1` sampling is easier than `\ell_2` sampling
- `||A_i||_\infty \le ||A_i||_2`, or `\Delta_d\subset\Ball_d`
- (The solution to `\max_{p\in\Ball_n}\max_{x\in\Ball_d} p^\top A x` is `||A||`)
`\ell_2` Sampling vs. Sketches
- Another possible approach: sketching/JL/random projections
- Map each `A_i` to `\tilde{A}_i\in\reals^m` with `m=O(\epsilon^{-2}\log(n/\delta))`
- This can be done so that `A_i A_j^\top \approx \tilde{A}_i \tilde{A}_j^\top` for all `i,j\in [n]`
- Solve the problem in "sketch space", and then map back
- Sketching works here, but is slower and takes more space
- Are there other applications where `\ell_2` sampling can be used instead of sketching?
- "Feature selection" for classifiers
- Matrix product
- Probably: nearest-neighbor search
`\ell_2` Sampling as Low-Rent Feature Selection
- Here we showed that `\ell_2` sampling estimates `Ax` in `O(n+d)` time
- With variance `\norm{A_i}^2\norm{x}^2` for estimate of `A_ix`
- By clipping and averaging, this gives a concentrated estimator
- Only an upper bound on the row norms of `A` is needed
- This could be applied to linear classification
- Weight vector is `x`
- Rows of `A` comprise the vectors to classify
- Sample `x` beforehand, storage `O(\epsilon^{-2}\log(q/\delta))`
- `q` bounds the number of rows of `A`
- Storage of `x` as for sketching, but classification is faster
Matrix Product via `\ell_2` Sampling
- We can extend from vector `x` to matrix `B`
- Pick row `i` of `B` with probability `Q_i\equiv \norm{B_i}^2/\norm{B}_F^2`
- Return outer product `A_{:i}B_i/Q_i` as estimate of `AB`
- Variance is about `\norm{A}_F^2\norm{B}_F^2`
- Can be repeated for concentrated estimator
- Needs upper bound on row norms of $A$
- Very similar to classical sampling of [DKM]
- (Also very similar to some sampling schemes for regresion)
- But: nearly oblivious to `A`
Concluding Remarks
- Bounds are tight for basic perceptron and MEB algorithms
- Kernel methods need improvement in additive `O(\epsilon^{-5})` term
- Stochastic gradient algorithms are of course also related
- Where else can `\ell_2` sampling supersede sketching?
- Are there `\tilde{O}(\nnz{A})` algorithms for these problems?